우주연구원 뉴스레터는 국내외 우주 정책, 국제 협력, 기술개발 동향과 더불어 연구원 내 주요 행사, KAIST 우주연구원은 2주 간격으로 국내외 우주 정책, 국제협력, 기술개발 동향과 더불어 연구원 주요 행사, 학회 소식, 국가 R&D 공모 정보를 선별하여 제공해 드립니다. 계속해서 뉴스레터를 받아보시려면 아래 ‘구독하기’ 버튼을 눌러 이메일 주소를 입력해 주십시오. |
|
|
KAIST, 2026년 항공우주학회 춘계학술대회서 연구성과 발표
03.31 (화) - 04.03 (금) | 신화월드 랜딩관
KAIST가 지난 4월 1일부터 3일까지 제주 신화월드 랜딩관에서 개최된 한국항공우주학회 2026년 춘계학술대회에서 인공위성, 우주탐사, 유도항법제어, 우주 서비스 및 제조 등 항공우주 전 분야에 걸쳐 연구성과를 발표했다. 이번 학술대회에서 KAIST는 132편의 논문을 발표하며, 국내 항공우주 연구를 선도하는 기관으로서의 위상을 다시 한번 확인시켜 주었다.
|
|
|
KAIST 인공위성연구소,
능동제어위성 기술, 궤도상 서비스 실현을 향한 연구 성과 발표
4월 1일 제6발표장에서 열린 능동제어위성 세션에서는 KAIST 인공위성연구소를 중심으로 능동제어위성 관련 핵심 기술들이 소개됐다. 본 세션은 단순한 위성 운용을 넘어, 실제 궤도상에서 다른 우주물체를 포착·접근·처리하는 On-orbit servicing 기술을 중심으로 구성되었다.
'우주물체 능동제어위성 임무분석 및 개발현황'과 '능동제어위성 구조체 설계 및 해석' 발표를 통해 위성의 안정적인 운용을 위한 핵심 설계 기술과 제어 전략이 공유됐다. 이어 '우주물체 능동제어위성 유도 및 포집 대상 관측', '우주물체 제거 임무를 위한 전개형 소프트 그래퍼 엔드이펙터 상세설계', '능동 우주물체 제거를 위한 궤도 역학 기반의 안정적 접근 유도 전략' 등의 발표를 통해 실제 우주 환경에서 표적 위성에 접근하고 포집하는 과정에 필요한 기술들이 다뤄졌다.
특히 비협조 우주물체에 대한 비전 기반 인식 기술도 이번 세션의 핵심 주제 중 하나였다. '비협조 우주물체의 영상 선분 분포 기반 상대 포즈 결정', '위성 6DoF 자세추정 모델을 위한 합성 데이터 생성 파이프라인', '인공위성 자세 도출을 위한 오중 광학시스템 활용 측광 관측 사전연구', '지상 망원경 광학 관측을 통한 인공위성의 밝기 변화 및 형상 분석' 등의 발표를 통해, 영상 및 광학 기반 상대 자세 추정 기술이 소개되었다.
|
|
|
KAIST 우주 서비스 및 제조 연구센터,
로봇·구조·재진입 기술 연구 성과 발표
4월 3일 제3발표장에서 진행된 우주 서비스 및 제조 세션에서는 KAIST 우주 서비스 및 제조 연구센터를 중심으로 궤도상 서비스와 우주 작업 수행을 위한 다양한 연구를 발표되었다.
‘다목적 우주 서비스 임무를 위한 로봇 형상 설계 및 경로 계획의 통합최적화’와 ‘모델 불확실성을 고려한 우주 매니퓰레이터의 전방향성 기반 NMPC 궤적 계획’이 발표되었으며, 이를 통해 임무 수행에 최적화된 로봇 구조 설계와 불확실한 우주 환경에서도 안정적인 제어를 위한 궤적 계획 기법이 제시되었다.
또한 밀폐 글러브박스 환경에서의 정밀 원격 조작 기술과 수치적 예측자-수정자 기반 재진입 유도 알고리즘의 연산 효율 향상 연구가 발표되었으며, 실제 운용 환경을 고려한 정밀 작업 수행 및 재진입 유도 성능 개선 방안이 다뤄졌다. 초저궤도(VLEO) 환경에서 Onyx 및 Onyx ESD 열가소성 복합재의 운용 적합성 평가 연구를 통해 극한 우주 환경에서의 소재 활용 가능성이 제시되었다.
아울러 ‘종이접기 원리를 응용한 전개형 다면체 구조물의 패턴 설계와 대나무 구조를 모사한 고강성 전개형 우주 구조 설계’가 발표되었으며, 자연에서 영감을 받은 이러한 구조 설계 연구들은 발사 시 부피를 최소화하고 궤도 진입 후 대형 구조물로 전개하는 미래 우주 인프라 구축에 기여할 것으로 기대된다.
|
|
|
KAIST, 항공우주 전 분야 연구 성과 발표
이번 학술대회 포스터 세션에서는 항공우주정책, 구조 및 재료, 우주탐사, 우주임무운영, 유도항법제어, 인공위성 체계, AI, 항공우주전자, 수직이착륙기 등 다양한 분야에서 KAIST 연구진의 성과가 발표되었다.
우주임무운영 분야에서는 ‘3U 큐브위성 K-HERO의 궤도 초기 운용과 현황’, ‘여명-황혼 궤도 위성의 지상국 접촉 시간 분석’, ‘저추력 위성의 온보드 충돌 회피 기동 최적화’, ‘평균 궤도요소 기반 궤도 자연 진화 분석’ 등 실제 위성 운용과 직결된 연구가 다뤄졌다. 또한 ‘Free-Floating 로봇 위성의 다물체 동역학 시뮬레이션’, ‘RecurDyn 기반 동역학 시뮬레이션’, ‘다수 매니퓰레이터를 장착한 우주비행체 시뮬레이션’ 등 시뮬레이션 기반 연구도 함께 발표되었다.
유도항법제어 분야에서는 ‘심층신경망-물리정보신경망 기반 전문가 혼합 모델을 활용한 람버트 솔버’, ‘양자 어닐링 기반 우주쓰레기 제거 경로 최적화’, ‘Homotopy method 기반 시간 최적 자세 프로파일 생성’ 등 AI 및 최적화 기법을 활용한 연구가 발표되었다. 이와 함께 ‘CMG 장착 고기동 위성의 해석적 자세 명령 생성’, ‘토크 제한 조건을 고려한 다축 회전 최소 시간 기동 분석’, ‘GNSS/LEO/INS 통합 항법 시스템 성능 평가’ 등 실제 위성 제어 및 항법 기술도 다뤄졌다.
우주탐사 분야에서는 ‘소행성 탐사용 플래시 라이다 모듈 개념 설계’, ‘금성 스윙바이를 이용한 화성탐사 발사창 분석’, ‘헤일로 궤도 간 천이 궤적 설계’ 등 심우주 탐사를 위한 궤적 및 센서 기술 연구가 발표되었다.
구조 및 재료 분야에서는 ‘인치웜 로봇의 우주 적용을 위한 구조 설계’, ‘유연체 기반 로버 주행 메커니즘 분석’이 발표되었으며, 인공위성 체계 분야에서는 ‘영상 기반 로봇암 검보정 및 상대거리 추정’, ‘우주용 가시광 센서 기반 스테레오 깊이 추정’ 등 비전 기반 기술 연구가 소개되었다.
AI 및 항공우주전자 분야에서는 ‘비지도 학습 기반 비협조 위성 탐지’, ‘강화학습 기반 플레어 대응’, ‘NOR Flash 메모리 방사선 오류 특성 분석’, ‘GNSS 신호 모델링’ 등이 발표되었으며, 수직이착륙기 분야에서는 ‘헬리콥터 로터 CFD-CSD 연계해석’ 연구가 수행되었다.
이번 학술대회를 통해 KAIST는 위성 설계부터 궤도 운용, 우주 로봇, 심우주 탐사, 자율 항법, 신소재에 이르기까지 항공우주 전 분야를 아우르는 방대한 연구 역량을 다시 한번 입증했다. 특히 AI, 양자컴퓨팅, 자연 모사 구조 설계 등 첨단 기술을 우주 분야에 적극 접목하는 시도가 두드러지며, 미래 우주 시대를 향한 KAIST의 도전이 더욱 가속화되고 있음을 보여주었다.
|
|
|
아르테미스 2호의 리드 와이즈맨 사령관이 달로 향하는 오리온 우주선에서 지구를 바라보고 있다./NASA
56년 만에 지구에서 가장 멀리 간 인류…아르테미스 2호
인류를 다시 달로 보내기 위한 유인 탐사 임무인 ‘아르테미스 2호’ 미션이 56년 만에 인류 유인 우주 비행 최장 거리 기록을 경신하며 새로운 역사를 썼다. 아르테미스 2호 승무원들은 지구에서 가장 멀리 떨어진 지점에 도달한 인류라는 타이틀을 거머쥐게 됐으며, 달 뒷면을 직접 관측하는 등 본격적인 달 근접 비행 임무에 돌입했다.
'아폴로 13호' 넘은 40만㎞ 비행…인류 역사상 '최장 거리' 경신
7일 미국 항공우주국(NASA)에 따르면 달 궤도 시험 비행 중인 아르테미스 2호의 우주비행사 4명은 비행 6일 차인 6일 오후 1시 56분(미 동부 표준시 기준) 지구에서 24만8655마일(약 40만148㎞) 떨어진 지점에 도달했다. 오리온 우주선에 탑승한 승무원들은 지구로 회항하기 전 최대 약 25만2760마일(약 40만6776㎞)까지 나아가며 인류의 활동 영역을 다시 한번 확장할 계획이다.
인류 최초 '달 뒷면' 육안 관측 예정…
기록 경신과 함께 승무원들은 달 근접 비행을 통해 고난도 과학 임무를 수행 중이다. 이들은 오후 7시2분(한국 시각 7일 오전 8시 2분)께 달 표면에서 약 4070마일(약 6550㎞) 거리까지 접근할 예정이며, 특히 인류 최초로 달 뒷면을 자신의 눈으로 직접 확인하는 우주비행사가 된다. 우주비행사들은 달 뒷면을 통과하는 과정에서 달이 태양 앞을 가리는 일식 현상을 목격하게 되며, 휴대용 디지털 카메라를 활용해 고해상도 달 표면 사진을 촬영하는 등의 임무를 수행하게 된다.
이후 달 표면 관측 임무도 정교하게 진행된다. 승무원들은 약 7시간의 관측 기간 동안 '오리엔탈레(Orientale) 분지'와 '헤르츠스프룽(Hertzsprung) 분지'를 집중적으로 살핀다. 38억년 전 형성된 오리엔탈레 분지와 이후의 충돌로 마모된 헤르츠스프룽 분지를 비교 분석함으로써 달 지형의 지질학적 진화 과정을 규명한다는 방침이다. |
|
|
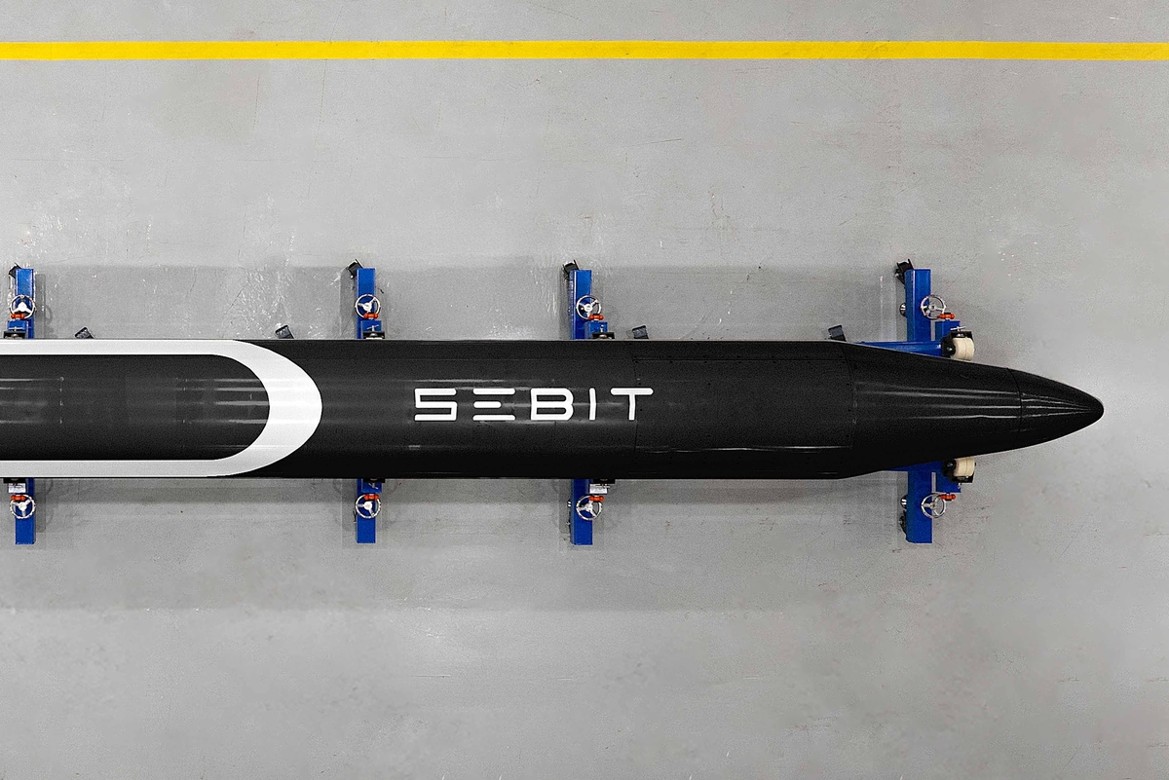
이노스페이스 다목적 준궤도 로켓 '세빛’/이노스페이스
이노스페이스, 준궤도 로켓 '세빛' 공개
우주발사체 기업 이노스페이스는 다목적 준궤도 로켓 '세빛'(SEBIT)을 공개하고 발사 서비스 포트폴리오 확장에 나선다고 31일 밝혔다.
세빛은 비행체 및 우주 부품 기술개발을 위한 시험·검증·연구 수요에 대응하는 발사체다.추력 3t급 하이브리드 엔진을 적용해 고도 50㎞ 이상 비행 성능을 확보했고, 비행 중 실시간 위치 및 탑재 정보 지상 전송이 가능하다고 회사는 밝혔다.
이를 통해 미소중력 환경 모사, 과학탑재체 및 우주 부품 기능 검증, 고속·고고도 환경 기술 검증 등 임무를 수행한다는 목표다.
세빛은 올해 7월 브라질 알칸타라 우주센터에서 초도 비행시험을 실시해 상용화를 위한 성능과 운용 안정성 등을 검증할 예정이다. |
|
|
아마존, 델타항공과 기내 와이파이 계약
아마존이 델타항공과 손잡고 2028년부터 항공기 500대에 기내 와이파이를 제공하기로 했다. 아마존 저궤도 위성(LEO) 인터넷 부문은 31일(현지 시각) 델타항공과 계약을 맺고 2028년부터 항공기 500대에 아마존 레오의 위성 터미널을 장착해 미국 노선부터 기내 와이파이 서비스를 개시한다고 밝혔다.
아마존 레오는 저궤도 위성 통신 사업인 ‘프로젝트 카이퍼’의 후신으로, 최근 아마존이 저궤도 위성 사업에 박차를 가하면서 새롭게 브랜딩했다. 올 7월까지 약 700기의 위성을 저궤도에 올려 일론 머스크의 스페이스X 스타링크에 이어 세계 2위 규모의 위성군을 구축한다는 목표다. 이번 계약은 아마존 레오의 두 번째 항공사 계약이다. 앞서 아마존 레오는 2027년부터 제트블루 항공기 25%에 기내 와이파이 서비스를 제공하겠다고 밝혔다.
이는 스타링크가 독주하던 저궤도 위성 통신 시장이 본격적으로 경쟁 체제로 전환되는 것을 의미한다. 일론 머스크의 스페이스X 스타링크는 유나이티드항공·알래스카항공·하와이안항공 등과 기내 통신망 구축 계약을 체결했고 지난달엔 사우스웨스트항공과도 신규 계약을 맺었다.
아마존은 앞으로 이 시장에서 스타링크를 따라잡기 위해 위성을 추가로 발사할 계획이다. 아마존은 2025년 4월 이후 위성 214기를 발사했다. 앞으로 1년간 20회 이상 위성 발사를 진행해 위성군 배치 속도를 두 배로 높인다는 계획이다. |
|
|
LIG넥스원, 'LIG D&A'로 새 출발
LIG넥스원이 창립 50주년을 맞아 'LIG 디펜스&에어로스페이스'(LIG Defense&Aerospace)로 사명을 변경하고, 항공·우주를 아우르는 글로벌 종합방산기업으로의 도약을 선언했다.
LIG넥스원은 31일 경기 용인하우스에서 열린 제24기 정기주주총회에서 사명 변경 안건이 원안대로 가결됐다고 밝혔다. 넥스원퓨처에서 LIG넥스원으로 사명을 변경한 지 18년 만이다.
새 사명은 방위산업(Defense)과 항공우주(Aerospace)를 결합한 것으로, 기존 방산 역량에 첨단 우주 기술력을 더해 미래 전장 환경을 선도하겠다는 의지를 담았다.
LIG D&A는 이를 바탕으로 위성체계, 차세대 항공무장체계, 무인 플랫폼 등 미래 국방 분야 관련 투자를 확대하고 사업 포트폴리오 다각화에 속도를 낼 계획이다.
아울러 중동과 아시아를 넘어 유럽과 미국, 남미 등으로 수출 시장을 확대하며 글로벌 방산기업으로의 입지를 강화한다는 방침이다. |
|
|
한국의 달 탐사 로버 제작사 무인탐시연구소'(Unmanned Exploration Laboratory, UEL)가 개발한 초소형 로버 스카럽(Scarab)./무인탐사연구소
한국 회사가 만든 로버, 2028년 달에 간다
한국 민간 기업이 만든 초소형 로버(rover)가 이르면 2028년 달을 향해 발사될 예정이다. 미션이 성공적으로 진행되면 이 로버는 달 표면에 도달한 한국의 첫 번째 로버가 된다.
한국의 달 탐사 로버 제작사 '무인탐사연구소'(Unmanned Exploration Laboratory, UEL)는 3월 31일 일본 도쿄에서 무인 달 착륙선 제작사인 '아이스페이스(ispace)와 로버운송과 관련된 계약을 체결했다.
이번 계약에 따라 UEL이 개발한 2kg급 로버 '스카랍'(Scarab)은 2028년 발사를 목표로 아이스페이스가 개발하고 있는 무인 달 착륙선(ULTRA)에 실리게 된다.
계약의 세부적 내용은 공개되지 않았다. 로버의 착륙 예상 지점도 알려지지 않았다.
이번 계약은 양사가 지난 2년간 구축한 신뢰를 기반으로 체결됐다. 양사의 페이로드 운송 협력은 2024년 10월 체결한 양해각서(MOU)를 통해 처음 공식화됐으며 이후 2025년 10월 국제우주대회(IAC)에서 '사전 페이로드 서비스 계약(IPSA)을 맺었다. |
|
|
유럽우주국, 저궤도 PNT 기술 검증 위성 발사
지구 저궤도 기반 위치/항법/시간(PNT) 기술을 검증할 유럽우주국(ESA) 12U 위성 2기가 3월 28일 우주로 올라갔다.
로켓랩의 일렉트론(Electron) 로켓에 실린 두 위성은 뉴질랜드에 있는 로켓랩 전용 발사장에서 이륙했다. 두 위성(IOD-1, IOD-2)은 이륙 약 한 시간 후 고도 510km, 준극궤도 (Quasi-polar LEO)에서 사출됐고, 이후 지상과 통신에도 성공했다.
ESA는 이번에 발사된 위성 2기를 포함한, 위성 11기 규모의 저궤도 PNT 군집위성(Celeste)을 2027년까지 건설할 계획이다. 필요한 위성의 개발은 스페인 기업 GMV와 이탈리아 기업 탈레스 알레니아 스페이스가 이끄는 컨소시엄이 담당한다.
Celeste는 유럽우주국(ESA)이 추진하는 전략적 프로그램으로, 유럽의 위성항법시스템 '갈릴레오'(Galileo)와 유럽의 위성항법 보정 시스템 'European Geostationary Navigation Overlay Service'(EGNOS)를 보완(complementary)하도록 설계됐다. 이를 통해 유럽 내 위차·항법·시각(PNT) 서비스의 정확도와 회복력, 보안성을 강화한다는 것 이 ESA의 계획이다.
이번에 발사된 두 위성은 Celeste 군집위성이 사용할 핵심 기술과 새로운 신호를 검증 하는 역할을 한다.
저궤도 기반 PNT 서비스는 현재 중궤도 기반 서비스의 단점을 보완하고, 새로운 서비스 제공을 가능하게 한다. 예를 들어, 고층 빌딩이나 도심 지역에서 GNSS 신호가 잘 잡히지 않는 경우 저궤도 PNT는 더 나은 성능을 제공할 수 있다.
또한, 저궤도 위성 통신과 연계하여 다양한 IoT 및 자율주행 서비스에 활용될 가능성이 있다. 드론, 자율주행차, 스마트 시티 등이 저궤도 PNT 서비스의 혜택을 보는 대표적 분야로 부각되고 있다, |
|
|
'라스벳(Rasisvet) 위성 16기를 실은 Sayur-2.1 로켓이 3월 23일 모스크비 북쪽 플레세스크 우주기지(Pleselsk Cosmodrome)에서 이륙하고 있다. /Roscosmos
러시아, 저궤도 우주인터넷 구축 시작…‘첫 위성 16기 발사’
러시아가 스타링크에 대응하는 저궤도 통신용 군집위성 구축을 시작했다.
관영 타스통신은 "군집위성 '라스벳'(Rassvet)을 구성할 첫 번째 위성 16기가 3월 23일 발사됐다"라고 24일 보도했다.
Soyuz-2.1b 로켓에 실린 위성은 모스크바 북쪽 플레세츠크 우주기지(Plesetsk Cosmodrome)에서 이륙했고, 이후 예정된 궤도에 사출됐다고 타스통신은 보도했다. 이어 러시아 항공우주기업 'Bureau 1440'의 관제 하에 위성의 성능 검증이 이루어지고 있다고 덧붙였다. Bureau 1440은 러시아 정부의 지원 하에 라스벳을 구성하는 위성의 제작과 운영을 담당한다.
이 위성들은 애당초 2025년 12월 발사할 예정이었으나 위성 생산에 차질이 빚어지면서 발사 일정이 올해로 연기됐다.
라스벳은 궁극적으로 전 세계를 대상으로 한 서비스를 겨냥하지만 1차 목표는 장거리 열차와 항공기 같은 교통수단을 포함해 러시아 전역에 초당 최대 1Gbps 수준의 고속 인터넷을 제공하는 것이다. 이를 위해 위성에는 5G 기술과 위성 간 레이저 통신 시스템이 탑재돼있다. |
|
|
한국, 2030년 달 간다…민간 착륙선 추진
정부가 2030년 초까지 달에 태극기를 꽂는 것을 목표로 소형 달 착륙선을 보내는 사업을 추진한다.
차세대발사체를 개발해 실어 보낼 달 착륙선과 별도로 민간 주도 소형 달 착륙선을 개발해 기존 계획보다 달에 도달하는 시기를 2년 이상 앞당긴다는 목표다.5일 과학기술정보통신부와 우주항공청 등에 따르면 과기정통부는 최근 열린 국가연구개발사업평가 총괄위원회에서 우주청의 '소형 달 착륙선 개발사업'을 예비타당성 조사 대상 사업으로 선정했다.
이 사업은 2030년 초 달 착륙을 목표로 기업이 체계종합기업으로 달 착륙선을 직접 개발하는 것을 지원하는 것으로, 설계부터 달 착륙 방법까지 기업에 맡기는 방식으로 운영된다.
발사에는 한국형발사체 누리호를 활용할 것으로 알려졌다.사업대로 착륙선이 개발되면 2032년 달 착륙을 목표로 개발 중인 한국형 달 착륙선보다 최소 2년 달 도달 시기가 앞당겨진다. |
|
|
한국, 중·고궤도 광학감시시스템 시범 운영 돌입
한국천문연구원(KASI)은 위성과 우주쓰레기를 추적하는 80cm급 중고궤도 광학감시 시스템 '브라헤'(BRAHE)가 시험 운영에 들어갔다고 3월 31일 밝혔다.
이 장비는 대전에 있는 천문연 본원에 설치됐다. 이번 시험 운영은 향후 해외 관측소(호주)에 설치될 장비를 사전에 검증하는 차원에서 진행된다.
브라헤는 지구 상공 약 1,500km 이상 중고궤도에 위치한 인공위성과 우주쓰레기를 탐 지추적하기 위한 광학 감시 시스템이다. 시험 테스트는 망원경이 설치될 실제 운영 환경과 동일한 조건에서 실시되며, 망원경 상태, 자동화 장비, 돔 상태 등이 점검 대상이다.
천문연은 2027년까지 호주 사이딩스프링 천문대(Siding Spring Observatory)와 자드코 천문대(Jardee Observatory)에 실전용 광학망원경(80cm급) 2기를 설치할 계획이다. 남반구 관측 거점을 확보해 한반도 경도대의 중·고궤도 우주 감시 공백을 보완한다는 구상이다.
사이딩스프링 천문대는 호주 뉴사우스웨일스주에 위치한 광학천문대로 망원경 인프라가 집적돼 국제 연구 협력이 활발하다.
자드코 천문대는 서호주 퍼스 인근 연구·교육용 천문대로 1m급 망원경 등 광학 장비를 갖추고 소행성·혜성 등 태양계 소천체 감시와 우주 파편 추적 연구에 활용된다.
이번 사업은 2024년부터 2027년까지 총 140억 원이 투입되는 국가 연구개발 과제로, 천문연이 민간 기업과 함께 시스템 설계와 제작을 맡고 있다. 착수 약 2년 만에 시제품 망원경 구축에 성공했다. |
|
|
세종 3호/한컴인스페이스
한컴인스페이스, 초분광 위성 '세종 3호’ 교신 성공
세종 3호는 지난 30일 오후 8시 2분(현지시간 30일 오전 4시 2분) 미국 캘리포니아주 반덴버그 우주군기지에서 스페이스X의 '팰컨9(Falcon 9)' 로켓에 실려 발사됐다.
이후 지상국과의 첫 교신에 성공하며 위성 본체와 시스템 상태가 정상임을 확인했다.
세종 3호'는 가로 200mm, 세로 100mm, 높이 340mm 크기에 무게 약 10.8kg인 초소형 위성으로, 고도 500~600km 저궤도에서 지구 관측 임무를 수행한다.
핵심 탑재체인 초분광 센서는 442개의 파장 밴드를 기반으로 물질 고유의 반사 특성을 분석할 수 있어 기존 영상 관측을 넘어 지표 물질의 특성까지 분석할 수 있는 차세대 관측 기술이다. 초분광 데이터는 작물의 생육 상태와 병해를 조기 탐지하는 정밀 농업을 비롯해 산림 관리, 환경 모니터링 등 다양한 산업에 활용될 수 있다. 또 위장이나 은폐된 대상 식별과 같은 고도화된 감시·정찰 영역으로도 확장이 가능하다.
한컴인스페이스는 기존에 운용 중인 세종 시리즈 위성과 '세종 3호'를 연계한 군집 운용 체계를 통해 재방문 주기를 단축하고, 데이터 융합 기반의 분석 역량을 강화할 계획이다. |
|
|
| 국내외 학술행사
□ 한국우주과학회 2026년 봄 학술대회
○ 기 간 : 2026. 4. 22.(수) ~ 4. 24.(금)
○ 장 소 : 여수 소노캄
□ [머니투데이] K-우주포럼
○ 기 간 : 2026. 4. 24 (금)
○ 장 소 : 서울 여의도 콘래드서울호텔
Read More
□ 한국우주안보학회 춘계 학술대회
○ 기 간 : 2026. 5. 14.(목) ~ 5. 15.(금)
○ 장 소 : 여수 히든베이호텔
Read More
□ 2026 해양영역인식 및 무유인체계 융합 발전 컨퍼런스
○ 기 간 : 2026. 5. 14.(목) ~ 5. 15.(금)
○ 장 소 : 부산 누리마루 APEC 하우스
Read More
□ 2026년 제11회 초소형위성 워크샵
○ 기 간 : 2026. 5. 27.(수) ~ 5. 29.(금)
○ 장 소 : 부산 해운대 웨스틴조선 호텔
○ 논문(초록 및 최종본) 제출기한 : ~ 2026. 3. 29.(일)
○ 사전등록 마감일 : 5. 1.(금)
○ 주 최 : 한국우주과학회
□ 항공우주학회 우주학술대회
○ 기 간 : 2026. 6. 24.(수) ~ 6. 26.(금)
○ 장 소 : 파라다이스호텔 부산
○ 논문(초록 및 최종본) 제출기한 : ~ 2026. 5. 8.(금)
○ 사전등록 마감일 : 6. 8.(월)
□ IAF Global Space Conference on Climate Change 2026
○ 기 간 : 2026. 6. 2.(월) ~ 6. 4.(금)
○ 장 소 : Kigali, Rwanda
□ IAC 2026 (77th International Astronautical Congress)
○ 기 간 : 2026. 10. 5.(월) ~ 10. 9.(금)
○ 장 소 : Antalya, Türkiye
○ 주 최 : IAF
|
|
|
| 사업공고
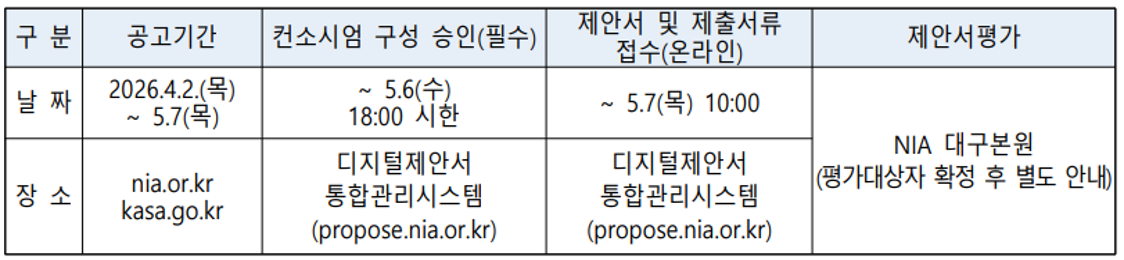
□ AI기반 위성정보 활용서비스 확산사업
○ 선정 방법
공모 (2개 컨소시엄, 과제당 1개)
○ 협약 기간
협약체결일~‘26.12.31.(목)
○ 사업 예산
정부출연금 8억원(과제당 4억원), 자체부담금(현금, 현물) 별도(매칭펀드 방식)
○ 공고 일정 |
|
|
□ 2026년도 우주소형무인제조플랫폼실증사업(R&D) 신규과제 공고
○ 사업 목적
우주환경에서의 전주기* 제조플랫폼 개발·실증을 통해 민간의 우주 신산업 진출 및 생태계 조성 기반 마련
* 발사 및 궤도 투입 - 고도조정 - 우주제조 - 탈 궤도 - 지구로의 회수
○ 사업 기간/예산
’26.4. ~ ‘30. 12. / 총 475억원(’26년 30억)
○ 사업 내용
국내기술 기반 우주 소형 무인제조플랫폼을 개발·활용하여 우주환경에서의 우주제조 및 제조 결과물을 회수하는 전주기 실증* 수행
* (’29년) 실험 수준의 우주제조, (’30년) 플랫폼 보완 및 시제품 수준의 우주제조
- 우주제조 전주기 실증을 수행할 제조모듈, 회수선, 궤도변경추진체로 구성된 플랫폼 개발
- 개발된 플랫폼의 우주환경 전주기 실증을 위해 우주수송, 궤도임무 및 우주제조, 회수·착륙 등 운용기술 개발
○ 수행 주체
산·학·연 컨소시엄 (주관연구개발기관은 학 또는 연) |
|
|
□ 2026년도 Space-K BIG 프로젝트 사업 신규과제 공고
○ 사업 목적
우주분야에 대한 기술개발 및 인력양성 역량을 보유한 대학을 연구센터로 지정·운영하여 우주 중점분야 기초원천기술 축적 및 전문인력 양성
○ 지원 분야
우주 핵심임무 기반 4개 중점 분야
① 우주수송, ② 인공위성, ③ 우주과학탐사, ④ 우주임무보증-(‘26년 선정분야)
- 인공위성/우주임무보증 분야 중 1개 센터 선정
※ ’25년 2개 분야(우주수송, 우주과학탐사) 선정 완료
○ 사업 내용
우주분야의 연구개발과 관련된 전문인재를 양성하고 체계적으로 관리하기 위한 종합적인 인재 양성 및 관리계획 제시
○ 수행 주체
산·학·연 컨소시엄 (주관연구개발기관은 학 또는 연) |
|
|
□ 2026년도 우주기술혁신인재양성(R&D)사업
[AI기반 우주항공 연구개발 프로젝트 고도화] 신규과제 공고
○ 사업목적
우주항공 글로벌 기술경쟁력 확보를 위해, 고급 연구인력의 체계적인 양성, 해외 우수인재 유치·활용을 통한 우주산업혁신 기반 조성
○ 사업 기간/예산
'26~’30(5년) / 70억
○ 사업 내용
우주항공 전분야를 대상으로 AI융합 통합교육 실시하고 AI를 활용한 데이터 분석 및 AI 융합연구 전문가 양성 및 배출
○ 수행 주체
대학, 출연(연), 기업 등 |
|
|
□ 2026년도 우주기술혁신인재양성(R&D)사업
[산학협력 연구현장 연계 고급 인력양성] 신규과제 공고
○ 사업목적
우주항공 글로벌 기술경쟁력 확보를 위해, 고급 연구인력의 체계적인 양성, 해외 우수인재 유치·활용을 통한 우주산업혁신 기반 조성
○ 사업 기간/예산
'26~’30(6년) / 50억
○ 사업 내용
지역 대학 중심의 협의체 구성 후 우주개발 주요정책과 연계한 협의체 내 기업들의 공통 수요 기술에 대한 연구개발 및 전문인력 양성
○ 수행 주체
|
|
|
□ 2026년도 우주기술혁신인재양성(R&D)사업
[우주항공 글로벌 인력양성 및 활용] 신규과제 공고
○ 사업목적
우주항공 글로벌 기술경쟁력 확보를 위해, 고급 연구인력의 체계적인 양성, 해외 우수인재 유치·활용을 통한 우주산업혁신 기반 조성
○ 사업 기간/예산
'26~’29(5년) / 200억
○ 사업 내용
해외 우수과학자를 국내 우주항공기관이 활용하고 해외인력들이 사업관리 및 연구에 전념할 수 있도록 비용 보조 및 지원
○ 수행 주체
대학, 출연(연), 기업 등 |
|
|
📡우주연구원 뉴스레터📡
우주연구원 뉴스레터는 국내외 우주 정책, 국제 협력, 기술개발 동향과 더불어
연구원 내 주요 행사, 학회 소식, 국가 연구개발 과제 공모 정보를 선별해 전달합니다.
|
|
|
Copyright © KAIST Space Institute. All rights reserved.
|
|
|
|
|